216.73.216.43
,
39163rd
2002/06/11 UPDATED
赤外線検出部については、家電用リモコンの受光モジュールを流用し、スタートラインに設置した 38KHz変調の赤外線を受光させます。
ソフトウェアは、Microchip社のアセンブラ mpasmでアセンブルしてあります。 mpasm は ftp://ftp.microchip.comで入手する事ができます。
PIC16C73では、プログラムエリアが4キロワード、8レベルスタックというスペックであるので非常にプログラムが楽にできました。
回路図中には電源レギュレータ付近に記載してありますが、パスコンは PIC16C73Aのできるだけ近くへ配置してください。 赤外線送信部は防水性能が重要であるので、VU管と言ういわゆる排水管を使ってケースを作ります。
配水管を15〜25cmに切断し、前側に永久蓋, 後ろ側にはひねると取れるタイプの蓋を取り付けます。
永久蓋には長方形の赤外光が出る穴をあけて、透明アクリル板もしくは赤外線フィルターで水が入り込まないよう接着します。
諸回路や電池ボックスなどは発泡スチロールを丸く切って内部に固定すると良いでしょう。
当然、後ろ側のひねると取れる蓋が付いているのは電池交換や電源スイッチ操作のためですから、その役目が果たせるような構造にしなければなりません。
赤外線送信機は送出窓を縦にしてスタートラインに設置します。
パイプ型形状は某社のホットラップに似ているので同じように設置固定すればよいでしょう。
受光モジュールは家電用であり、テレビのリモコンに反応するのでギャラリーにイタズラされないよう注意しましょう。
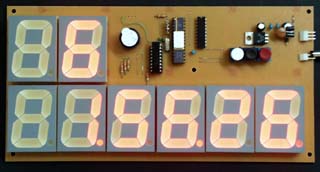
ピットロードに入り本コースに入るときにスタートボタンを押します、この時画面は READYピリオドが点滅します。
最初の1周目はたいがいウォームアップ走行ですから、最初の赤外線検出までは計測が開始されません。
ぐるっと廻ってきてスタートラインを通過し、赤外線を検出すると、計測が開始され、ラップ番号表示部には、" 1"が表示されます。
以降赤外線を検出する毎に 現在のラップ数, 直前ラップのタイムが表示されます。 また、赤外線を検出してから2秒間(短いか?)は前々回のラップタイムとの差分、又はファーステストラップとの差分が表示されます。どちらの差分をとるかは、ストップボタンを押しながら電源を投入するか否かで選択できます。
何周かすると1ヒートが終了するわけですが、計測を終了するには、エンドを押下します。すると、LAP CONTENTSピリオドが点滅し、周回したラップ毎の計測リストを表示することができます。
スタートボタン/エンドボタンがそれぞれ 次ラップ, 前ラップなっており、各周の記録をプレビューすることができます。 また、ファーステストラップは点滅表示します。
リセットボタンを押す事により、スタンバイ状態にジャンプし、再び計測を開始することが可能です。
操作ボタンは、スタート, エンド, リセットの3ボタンのみです。電源投入後しばらくすると、スタンバイのピリオドが点滅します。走行会などではピットでエンジンを始動した時の状態と言えるでしょう。
タイトル画面 電源オン
|
スタンバイ状態 ピットロードからコースへ進入、スタート押下。
|
READY点滅 最初の赤外線検出待ち
|
計測 ヒート終了時エンド押下
|
結果表示 リセットボタン押下により、スタンバイ状態に
戻る。
PIC16C7x User's Manual Microchip MPASM User's Guide Microchip インターフェースドライバーIC 東芝
![[注意]不適正な題名は即座ゴミ箱、名前を名乗らぬ者への返事はしない事があります。フリー系メールからは自動的に拒絶する場合があります。](/~kashima/maddr2.gif) -- LINK FREE -- |
||
| HOME | LAST |
{kind=link}